Ken E-ARM
Robotics/Automation Design
Project Overview
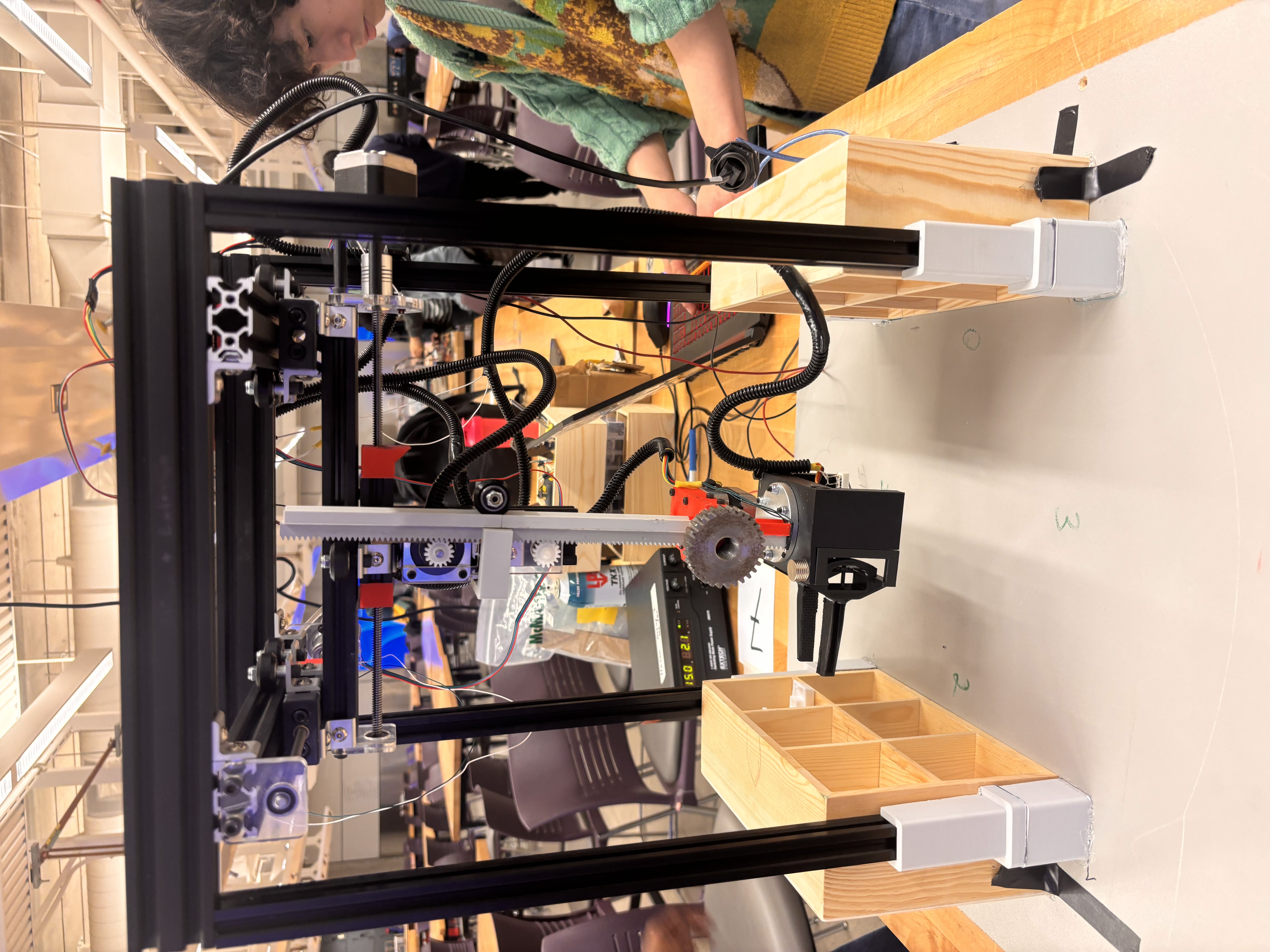
To develop a mechanical system that demonstrates full range of motion within a 24x24x24 cubic workspace. Also providing smooth operation and high precision by positioning the 3D benchy within the compartment space, ensuring stability, accuracy and dexterity in confined space while within $300 budget. There are 4 difference areas with 36 possible locations for the end effector to access and place the 3D benchy.

My Contributions - End Effector
Alongside technical support and testing, my major contribution was the end effector (gripper + the arm). From the prototyping phase between choosing a servo verses a stepper motor gripper action to working on the stepper motor arm rotation code was quite a challenge.
The gripper mechanism runs on a servo motor with an mechanical clamping mechanism with two states: open (28 mm) and closed (11 mm). The white arms are linkages connected to a rotating central shaft (shown with a purple line), which drives the motion of the jaws. As the shaft rotates, the linkages pivot and pull the black jaws inward or outward to clamp or release a workpiece. The gripper must open and close wihin the compartment space without contracting the walls.
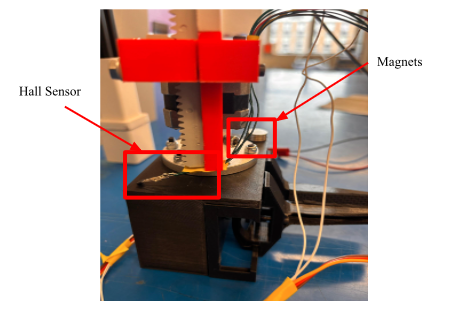
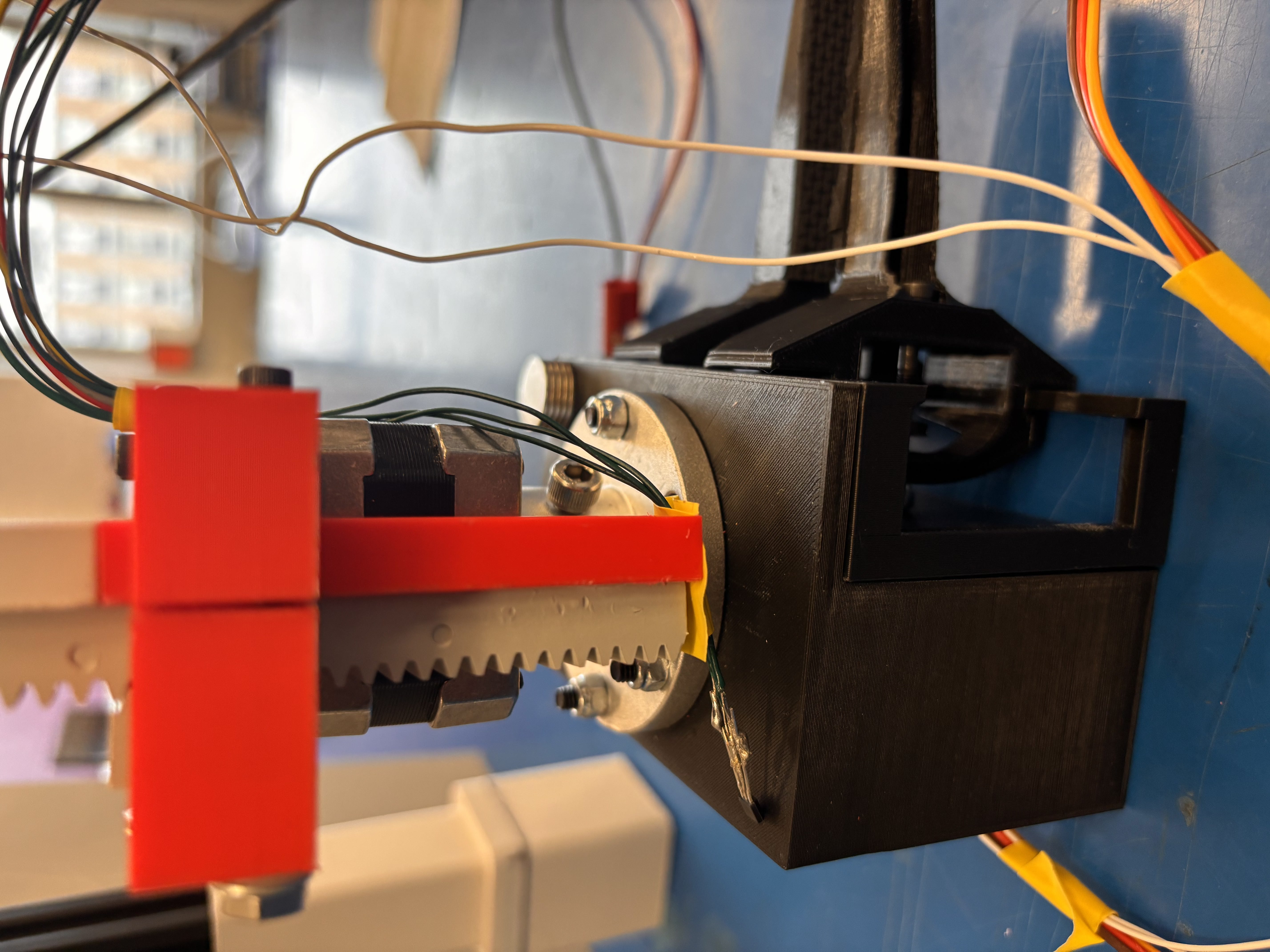
The Arduino code of the end effector, two functions were implemented. The first function controls the servo motor by setting a specific angle to ensure a precise and secure grip on the object. The second function governs the stepper motor, determining the target box position among four possible areas by rotating in 90-degree increments to 0°, 90°, 180°, or 270°, based on the desired destination. In addition to resetting the rotation, a hall sensor was added where once the magnet aligned with the sensor it will automatically stop and reset.
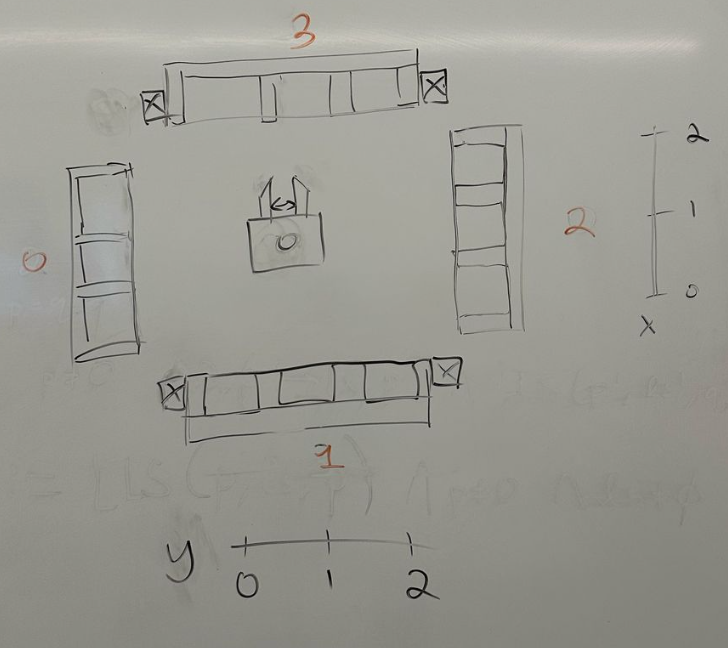
The logic of the gantry system as seen from the top image:
- The gantry system runs on a 3D coordinate system where each axis has three coordinates labelled as 0, 1 and 2.
- The four walls surrounding the gantry are labelled as 0, 1, 2 and 3.
- Once the system calibrates, it goes to it's default centre position and asks user for the pickup and drop off locations.
- Once input is received, the system automatically navigates the coordinates and completes motion.